Buenas tardes.
Bueno, pues parece que esto va tomando forma, y he averiguado varias cosas.
Como ya os he comentado, estoy registrado en un foro de construcción de ROV, con proyectos similares al mío, y tengo un tema abierto en este enlace.
www.homebuiltrovs.com/rovforum/viewtopic.php?f=18&t=1908
Es un coñazo, tener que escribir las preguntas en Español, y luego traducirlas al Inglés, menos mal que lo hago con el traductor de BING, pero aun así, es un lio, porque traduce lo que quiere y como quiere, y tengo que estar traduciendo y volviendo a traducir las frases, para comprobar que tengan sentido, pero bueno, a pesar de las dificultades he conseguido varios progresos.
El Americano que me está ayudando, Bigbadbob, después de mucho comentar como mejorar el programa, ha llegado a la conclusión de que el Arduino se hace un lio al tener que utilizar los dos Puertos Serie, a la vez que el bus SPI para controlar el mando, por lo tanto la mejor solución a la que hemos llegado, es que hay que separar lo que hasta ahora tenía como “Código Maestro”, en dos partes y en dos Arduinos, una parte del código en un Arduino que solo controle el mando, y otra parte del código que controle los sensores y mande los datos, de momento al ordenador, y después a la pantalla Nextion, en otro programa y en otro Arduino.
Como no se puede utilizar la Comunicación Serie, con la impresión de datos y con el mando de la PS2, todo junto, en un mismo programa y en un solo Arduino, por lo tanto, tengo que utilizar tres Arduinos, dos en el puesto de control, y uno dentro del ROV, y a demás así es como lo tiene el montado, después de un montón de tiempo intentando hacerlo de otras formas, y no sacando nada diferente en claro.
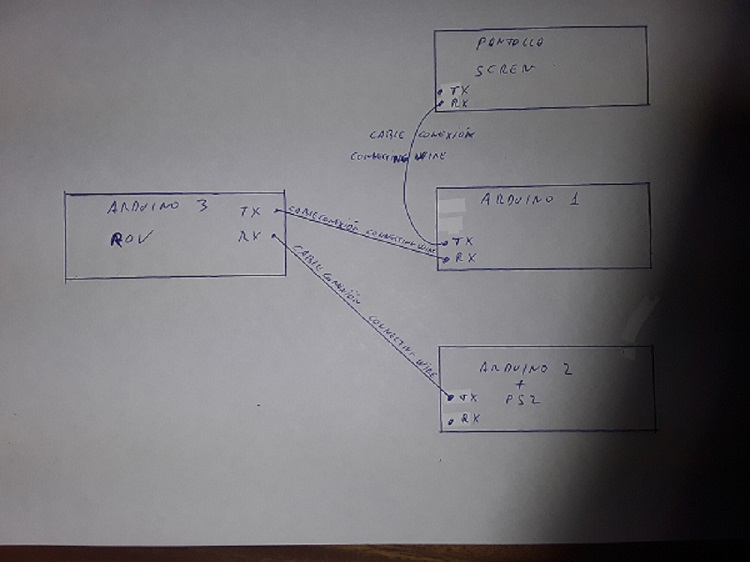
El sistema funciona de la siguiente manera.
El Arduino que está dentro del ROV, controla los sensores y solo manda por el puerto TX los datos a un Arduino, que está en el puesto de control, que los recibe por el puerto RX, los interpreta y los manda a la pantalla.
A su vez el mismo Arduino que está dentro del ROV, por el puerto RX, solo recibe los datos del mando PS2, y ejecuta las ordenes del mando.
Es un poco más lioso pero es la única manera de que funcione, pongo una foto para que veáis que no es tan complicado como resulta explicarlo escribiendo.
La foto no es para ganar un premio Pulitzer, pero se ve lo que os quiero decir.
Un saludo